9188游戏网:绿色干净的手游下载平台!
您好!欢迎来到9188游戏网!
网站导航
9188游戏网:绿色干净的手游下载平台!
您好!欢迎来到9188游戏网!
网站导航
2026-03-11 17:12:48
来源:互联网
评论:
运用导航开车时,明明已然抵达路口,可却不清楚该朝着哪条道路行进,屏幕上所显示的箭头与实际情况始终无法契合,这般错位之感,是否曾令你陷入抓狂状态呢?在2020云栖大会之际,高德地图的王前卫团队予以披露,依据AR以及车道级导航技术,他们正将这种“大致差不多”的体验,提升至“所见到的便是实际能得到的”精准时期。在此背后,是一整套强硬核心技术施行落地的实践,全都是满满的实用内容了。
要是想达成AR导航,首先就得使得手机摄像头跟人一样能够看懂道路。高德并未选取昂贵的激光雷达,而是着重于视觉技术,运用深度学习算法去理解环境。核心面临的挑战在于,算法模型一定要足够“轻”,才能够在市面上主流的手机上实时运行,同时还得确保识别准确。

基于解决这一矛盾的目的,团队实现了在数据方面的优化,在算法方面的优化,以及在性能方面的优化,此三者构成了三重优化。于数据层面,团队运用海量多源数据展开训练,以此确保模型接触过形形色色、稀奇古怪的路况情形。在算法层面,团队借助优化网络结构以及特征共享的方式,致力于提升精度。而在最为关键的性能层面,团队采用了知识蒸馏以及模型量化的手段,达成了让模型于低算力手机上也能够流畅运行的效果。

常有的情况是,GPS于城市峡谷之中漂移,信号一旦漂移,导航便会“犯晕”。高德提升定位精度至一个数量级所依靠的,乃是云端一体的视觉定位技术。手机端拍下图像后,将其传到云端与街景大数据进行比对,神经网络据此直接算出你的绝对位置。

这尚未结束,将其呈上,与此同时,借助对车道线的识别、对路沿的识别来开展相对定位。把这两者予以结合之后,再凭借时空一致性算法实施融合,如此一来,便能够在信号欠佳的区域稳住局面。这种打法成功地将定位误差从米的级别拉至厘米的级别,为车道级导航奠定了基础。

假如进入了隧道,或者进入了地下车库,网络没了该如何处理呢?高德设计了一系列多源紧耦合SLAM技术,简称为MT-SLAM。它将低成本的GPS、手机惯导以及摄像头数据深度捆绑融合起来,即便没有信号,也能够依靠算法推算出你的精确位置以及姿态。

这个系统的巧妙之处在于,它在于进行分层融合以及效率优化,它依据GPS不同信息的精度特性,进行分层处理,并且还会考虑车辆的运动约束,进而为了能够算得快,它会依据场景动态缩减优化对象,采用增量递归的方式快速恢复位置数据,以此为高精地图的众包采集以及AR导航持续提供能量。

在现实情形里,用户所处场景存在极大差异,其中部分场景需求高精度定位,而另外部分满足标准精度便足矣。假若是每套方案都配备一套硬件设施,那么所产生的成本将会过高。高德所施行的做法乃是设计出一套高精度/高标准一体化融合定位引擎,这引擎如同一个具备广泛适用性的万能插座,能够满足各种各样的需求。
这一套引擎,集成了成熟的差分卫星定位,以及环境语义信息,能依据场景自动切换或者联合输出定位结果,高精与标精,既独立又存在关联,确保你于城市峡谷、开阔地,或者地下停车场时,定位永远不会掉线,为车道级预警以及自动驾驶功能,提供了连续不断的保障。
随着高精定位以及环境感知的具备,地图数据其自身同样需要进行升级 ,径直推行厘米级高精数据 ,将全国予以覆盖的成本是非常高的 ,高德采取了另寻途径的方式 ,运用标准精度数据以及车道属性信息 ,借助算法反向构建出高精道路模型。
他们主要着手于两个维度,其一为道路三维模型,借助SD形点数据并结合车道属性,经由路口切分以及还原算法来进行建模;其二是引导线模型,将规划路径、引导信息与实时道路图像特征相融合。这一整套算法已然实现落地,以低成本的形式使三维模型趋近于真实世界。
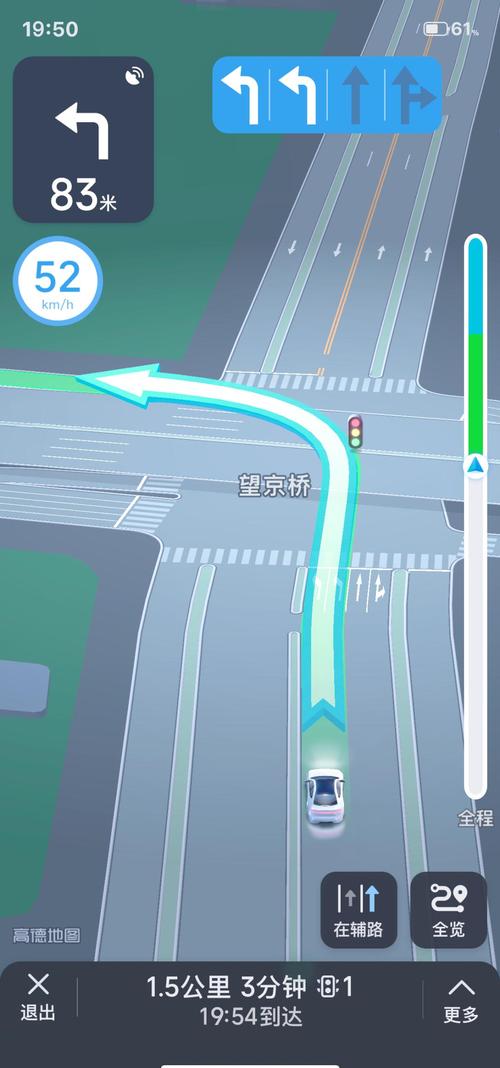
数据已就位,定位也已就位,最后需要渲染呈现那一步。在 AR 导航当中,有一条虚拟铺路线,它是用来指引你前进的,这条虚拟铺路线必须紧紧贴在现实路面之上,绝对不可以跟着车晃动。要做到这一点,还需要把刚才计算出来的车道级三维模型,与实时提取的道路特征信息精准叠加起来。
王前卫讲,当下,高德的引导线模型于绝大多数情形中,已然能够达成跟实景道路的精妙契合。路口变道提示不再单单是一种语音,而是于画面之上直接借由大箭头覆盖于准确的车道处,红绿灯前还能够提示你前车已然起步前行,切实实现了导航信息跟现实世界的毫无缝隙地融合。
从能够看懂道路,到可以确定准确位置,再到实现低成本建模以及精准渲染,这样一套AR导航的技术演进路径,实际上给我们自身做事也带来了启发:面对瓶颈之时,不妨尝试运用算法以及融合的思路,去以低成本的方式解决复杂问题。你于开车之际遭遇过最为离谱的导航“翻车”经历是怎样的呢?欢迎在评论区进行分享,并且也不要忘记点赞转发,以使更多朋友能够看到导航背后的技术门道。
相关文章
游戏评论
猜你喜欢